Laser-based distance measurement often serves as a way of positioning parts, navigating automated vehicles like stacker cranes, and measuring the dimensions of objects like boxes. There are three common technologies behind laser-distance measurement: optical triangulation, phase correlation, and true time-of-flight (TOF) technology.
Some products claim to use TOF, when they actually employ phase correlation instead. Phase correlation has significant weaknesses compared to true TOF; it has shorter measurement distances, greater sensitivity to object color, and is more susceptible to environmental influences like lighting. Because of this confusion, the term pulse-ranging technology, or PRT, is used to indicate true TOF technology.
Pulse-ranging-technology sensors emit short bursts of high-intensity laser light at up to 250,000…times/sec. The light intensity of a PRT sensor can be up to 1,000× greater than that of a phase-correlation sensor, which uses an emitter that is on continuously.
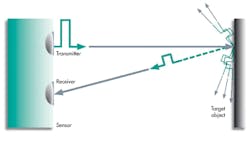
The light bursts travel to an object or reflector and then reflect back to the sensor’s receiver, or light-sensitive element. The sensor measures the time lapse from the emission of the light burst to the detection of the burst by the sensor’s receiver element. This time is then used to calculate the distance from the sensor to the detected object:
s = c × tl/2
Where s = distance measured in meters
c = speed of light in air (299,792,458 m/sec), and
tl= measured elapsed TOF of the light burst in seconds.
Because phase correlation measures distance based on the shifted phase angle of reflected light, its use is limited to the range over which the light phase can shift by up to 360°. If a phase-correlation device is used beyond that range, it may falsely identify the range as a 360° phase shift closer or farther away. The PRT design does not have any such limitation. Pepperl+Fuchs supplied information for this column.
About the Author
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: