An Overview of Proximity Sensors

This article was updated May 21, 2024. It was originally published Sept. 1, 2001.
Introduction to Proximity Sensors
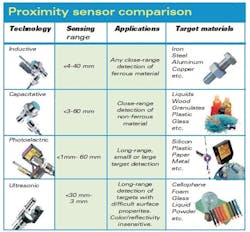
Proximity sensors detect the presence or absence of objects using electromagnetic fields, light and sound. There are many types, each suited to specific applications and environments. Here’s a look at the most popular proximity-sensing technologies.
This article tackles the following FAQs:
- What are the different types of proximity sensors?
- How do inductive and capacitive sensors differ?
- What are the applications of photoelectric sensors?
Understanding Inductive Sensors
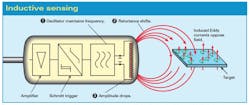
Inductive sensors are non-contact proximity sensors that detect ferrous targets, ideally ones made of mild steel thicker than one millimeter. They consist of four major components: a ferrite core with coils, an oscillator, a Schmitt trigger and an output amplifier. They are housed in enclosures typically made of nickel-plated brass, stainless steel or PBT plastic.
The oscillator creates a symmetrical, oscillating magnetic field that radiates from the ferrite core and coil array at the face of the sensor. When a metal target enters this magnetic field, small electrical currents (eddy currents) induced on the metal’s surface change the reluctance (natural frequency) of the magnetic circuit, which in turn reduces the oscillation amplitude. As more metal enters the sensing field, the oscillation amplitude shrinks, and eventually collapses. (This is the “Eddy Current Killed Oscillator,” or ECKO, principle.) The Schmitt trigger responds to these amplitude changes and adjusts the sensor’s output. When the target finally moves out of the sensor’s range, the circuit begins to oscillate again and the Schmitt trigger returns the sensor to its previous output.
Operating Principals of Induction Sensors
If the sensor has a normally open configuration, its output is an “on” signal when the target enters the sensing zone. With normally closed sensors, the output is an “off” signal when a target is present. Output is read by an external control unit such as a PLC, motion controller or smart drive that converts the sensor’s “on” and “off” states into usable information.
Inductive sensors are typically rated by frequency, or on/off cycles per second. Speeds range from 10 to 20 Hz in ac, or 500 Hz to 5 kHz in dc. Because of magnetic field limitations, inductive sensors have a relatively narrow sensing range—from fractions of millimeters to 60 mm on average. (Longer-range specialty inductive sensors are also available.) And what inductive sensors lack in range, they make up for in environment adaptability and metal-sensing versatility.
READ MORE: Sensor Sense: Inductive position-measuring sensors
Applications and Limitations of Induction Sensors
To accommodate close ranges in the tight confines of industrial machinery, geometric and mounting styles available include shielded (flush), unshielded (non-flush), tubular and rectangular “flat-pack.” Tubular sensors, by far the most popular, are available with diameters from 3 to 40 mm
Inductive sensors have no moving parts to wear out, so proper setup guarantees long life. Sensors with IP ratings of 67 and higher can withstand the buildup of contaminants such as cutting fluids, grease and non-metallic dust, both in the air and on the sensor itself. It should be noted that metallic contaminants such as filings from cutting applications sometimes affect the inductive sensor performance.
Exploring Capacitive Sensors
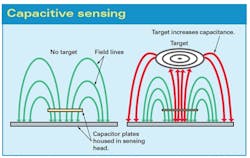
Capacitive proximity sensors detect both metallic and non-metallic targets in powder, granulate, liquid and solid form. They can also “see” through nonferrous materials.
In these sensors, two conduction plates (at different potentials) are housed in the sensing head and positioned to operate like an open capacitor. Air acts as an insulator; at rest there is little capacitance between the two plates. Like inductive sensors, these plates are linked to an oscillator, a Schmitt trigger and an output amplifier.
As a target enters the sensing zone, the capacitance of the two plates increases, causing oscillator amplitude to change—in turn changing the Schmitt trigger state and creating an output signal. If the sensor has normally-open and normally-closed options, it is said to have a complimentary output. Note the difference between inductive and capacitive sensors: Inductive sensors oscillate until the target is present and capacitive sensors oscillate when the target is present.
Comparison of Capacitive with Induction Sensors
Capacitive sensing involves charging up plates, so it is somewhat slower than inductive: 10 to 50 Hz, with a sensing distance from 3 to 60 mm. Many housing styles are available; common diameters range from 12 to 60 mm in shielded and unshielded mounting versions. Housings are usually metal or PBT plastic, making them rugged enough to be mounted close to the monitored process. Due to their ability to detect most types of materials, capacitive sensors must be kept away from non-target materials to avoid false triggering. For this reason, if intended targets contain ferrous material, inductive sensors would be a more reliable option.
Photoelectric Sensors: Versatility and Applications
Photoelectric sensors have proven so versatile that engineers and designers use them to solve most of the problems in industrial sensing. They commonly detect targets less than 1 mm in diameter or from 60 m away.
Photoelectric sensors are classified by how light is emitted and delivered to the receiver. However, all of them consist of a few basic components: a light source such as an LED or laser diode, a photodiode or phototransistor receiver to detect emitted light, and supporting electronics that amplify the received signals. The emitter, sometimes called the sender, transmits a beam of visible or IR light to the detecting receiver.
Types of Photoelectric Sensors
All photoelectric sensors operate under similar principles but there are different classifications. Dark-on and light-on classifications, for example, refer to light reception and sensor outputs. If outputs are generated when no light is received, the sensor is dark-on. If they are generated from light received, the sensor is light-on. There are also photoelectric sensors that can be set by technicians using a switch or wiring the sensor accordingly to be either light- or dark-on sensors.
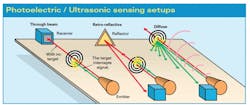
Through-beam photoelectric sensors are the most reliable class of photoelectric sensors. In through-beam sensors the receiver and emitter are in sperate housings. The emitter provides a constant beam of light and when an object interrupts that beam, it gets detected. Despite its reliability, through-beam is the least popular photoelectric setup due to the cost and labor needed to buy, install, and align the emitter and receiver in two opposing locations, which may be quite a distance apart.
Through-beam sensors typically offer the longest sensing distance of photoelectric sensors, 25+ meters. Laser LEDs can transmit well-collimated beams 60 m for increased accuracy and detection. Some through-beam laser sensors can detect an object the size of a fly at that range; at close range, objects can be as small as 0.01 mm. But although these laser sensors increase precision, response speed is the same as with non-laser sensors, typically around 500 Hz.
READ MORE: 2023 IDEA Awards: Sensors & Software Nominees | Machine Design
One ability unique to through-beam photoelectric sensors is that they work despite thick airborne contaminants. Still, if pollutants build up on the emitter or receiver, there is a higher probability of false triggering. However, some manufacturers put alarms in the sensor’s circuitry that monitor the amount of light hitting the receiver. If the detected light decreases below a specified level without a target in place, the sensor sends a warning through a built-in LED or output wire.
Retro-reflective photoelectric sensors have the next longest photoelectric sensing distances, with some of detecting targets 10 meters away. Operating similarly to through-beam sensors, output occurs when a constant beam is broken. But the emitter and receiver share a housing and face the same direction. The emitter sends a laser, IR or visible light beam toward a reflector designed to send the beam back to the receiver. When an object breaks the light path, it is detected.
One advantage retro-reflective sensors have over through-beam versions is that they are easier to install (a single housing in a single location) and the opposing side is just a mounted reflector. However, shiny and reflective targets—such as mirrors, cans and plastic-wrapped juice boxes—can reflect enough light to trick the receiver into thinking the beam was not interrupted, causing erroneous outputs. Some manufacturers have addressed this problem with polarization filtering, which only detects light that bounces off specially designed reflectors.
Diffuse photoelectric sensors also have the emitter and receiver sharing a housing, but there is no reflector. Instead, the target serves that role. The emitter sends a beam of light—usually a pulsed IR, visible red or laser that diffuses in all directions—filling the detection area. When a target enters this area, it deflects part of the diffused beam back to the receiver. When enough light is reflected to the receiver, the sensor which can be light- or dark-on, signals that a target has been detected.
With only the emitter/receiver housing to mount, diffuse sensors are usually simpler to install than through-beam and retro-reflective types.
READ MORE: Advances in Motion Sensors Lead to Smart Motion
One seeming disadvantage of diffuse sensors is that they are sensitive to the target’s material and surface properties. Non-reflective targets such as matte-black paper, for example, must be closer to the sensor to be detected than similarly sized bright white targets. But what seems a drawback can be useful. Because diffuse sensors are somewhat color dependent, they can be designed to distinguish dark and light targets for sorting or quality control.
Reflective backgrounds were once a problem for diffuse sensors. They can shorten the sensors sensing distance and generate false positives, indicating a target is present when it isn’t. So, engineers developed two ways to force the sensors to only “see” targets and ignore backgrounds.
The most common uses fixed-field technology. In this approach, the emitter sends out a beam of light, just like a standard diffuse photoelectric sensor, but there are two receivers. One focuses on where the target should be, the sensing sweet spot; the other focuses on the long-range background. A comparator determines if the long-range receiver is detecting higher intensity light than what the focused receiver is getting. If it is higher, the output stays off—i.e., no target. Only when the focused receiver light intensity is higher will an output be generated.
The second method takes it a step further, employing an array of receivers with an adjustable sensing distance. The senor uses a potentiometer to electrically adjust the sensing range. Such sensors operate best at their preset sweet spots. They also provide higher tolerances for inspecting small parts and improved ability to detect colors. However, target surface qualities, such as glossiness, can generate varied results. In addition, highly reflective objects outside the sensing area tend to send enough light back to the receivers for an output, especially when the receivers are electrically adjusted.
To combat these limitations, some sensor manufacturers developed a technology known as true background suppression by triangulation.
READ MORE: A Primer on Sensors for Machine Automation
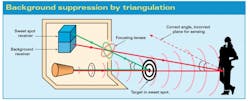
A true background suppression sensor emits a beam of light just like standard, fixed-field diffuse sensors. But instead of detecting light intensity, background suppression versions detect the angle at which the beam returns to the sensor.
To accomplish this, sensors use two (or more) fixed receivers and a focusing lens. The angle of received light is mechanically adjusted, allowing for a steep cutoff between target and background sometimes as small as 0.1 mm. This is a more stable method when there are reflective backgrounds, or when target color variations are an issue; reflectivity and color affect the intensity of reflected light, but not the angles of refraction used by triangulation-based background suppression sensors.
Ultrasonic Sensors: Precision and Adaptability
Ultrasonic proximity sensors use sound waves to detect objects, so color and transparency do not affect them (though some extreme textures might). This makes them ideal for a variety of applications, including long-range detection of clear glass and plastic; distance measurements; continuous fluid and granulate level control; and stacking paper, sheet metal and wood.
The most common configurations are the same as in photoelectric sensing: through beam, retro-reflective and diffuse versions.
Ultrasonic diffuse sensors employ a sonic transducer which emits a series of sonic pulses then listens for their return from the reflecting target. Sensing ranges can be up to 2.5 m. Sensitivity, defined as the time window for listen cycles versus send or transmit cycles, may be adjusted via a teach-in button or potentiometer. Standard diffuse ultrasonic sensors give a simple present/absent output, and some output analog signals indicating distance with a 4 to 20 mA or 0 to 10 Vdc variable output. This output can easily be converted into usable distance information.
Ultrasonic retro-reflective sensors also detect objects within a specified sensing distance, but by measuring propagation time. The sensor emits a series of sonic pulses that bounce off fixed, opposing reflectors (any flat hard surfaces). Sound waves must return to the sensor within a user-adjusted time interval, or it is assumed an object is obstructing the sensing path. Because the sensor listens for changes in propagation time as opposed to just returned signals, it is ideal for detecting sound-absorbent and deflecting materials such as cotton, foam, cloth and foam rubber.
Similar to through-beam photoelectric sensors, ultrasonic throughbeam sensors have the emitter and receiver in separate housings. When an object disrupts the sonic beam, the receiver triggers an output. These sensors are ideal for applications that require the detection of a continuous object, such as a web of clear plastic. If the clear plastic breaks, the output of the sensor will trigger the attached PLC or load.
Thomas A. Kinney is an application engineer at Baumer Electric.
About the Author
Thomas A. Kinney
Application Engineer, Baumer Electric
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: