Flexible rotary shaft operation, uses, and advances

Flexible shafts are mechanical power-transmission devices used to transmit rotary motion through bends and curves. They can be routed over, under, and around obstacles which would be otherwise impossible for a solid shaft — and costly for universal joints.

Flexible shafts are made of layers of high-tensile wire wound over each other at opposing pitch angles. When torque is applied to the flexible shaft, the wire layers expand or contract depending on the direction of the rotation. If the torque causes the outer layer to contract, the layer underneath will expand. This creates a dynamic interference between the layers of the shaft resulting in high torsional stiffness — approximately 100 times greater than the sum of the individual layers acting alone.
Flexible-shaft benefits
System designers opt for flexible shafts when rigid shafts just won’t work. But flexible shafts also eliminate alignment problems because they do not require tight tolerances. This gives designers more options when positioning motor and drive components, and they permit a full 180° offset while maintaining efficiency. Engineers can use flexible couplings or universal joints, but they allow only 5 to 30° offset and reduce efficiency by 40 to 50%. Flexible shafts in general are 85 to 95% efficient, which is typically better than gears, universal joints, and belts and pulleys, which lose efficiency because of higher frictional losses. And they have a 3 to 1 weight advantage over these other design options.
They also install in minutes without special tools or skills. Installation of solid shafts, gears, pulleys, and universal joints require precise alignment and skilled mechanics. The bearings and housings for solid shafts and gears require precise machining operations. Flexible shafts eliminate the need for tight tolerances and high costs.
Another perk is that system designers can incorporate flexible shafts at any project-development stage. Conventional rotary-motion devices must be engineered early on because of their rigidness, defined configurations, and large mass. One-piece flexible shafts permit greater design freedom because they eliminate the complex coordination of multiple components.
Varied uses
Flexible shafts can run from 0.020 to 1.25 in. in diameter and from 2-in. to 100âft long. Very-high yield strength is critical in maintaining precise positioning response over many rotations. Yield strength can be as high as 400 lb-in. of torque at speeds reaching around 18,000 rpm for some aerospace applications. The vibrations from these systems do not affect the performance of a flexible shaft.
Because of these variances in size paired with high yield strength, flexible shafts are used extensively in the aerospace, medical, automotive, and other industrial markets. For example, engine-thrust reversers use flexible shafts to transmit power to actuators which drive thrust-deflection doors, or vanes, on most commercial aircraft jet engines. The deflectors reverse the direction of thrust from the engines, slowing the aircraft on landing.

On commuter aircraft, typically 100 seats and smaller, ball-screw linear actuators control the leading (slat) and trailing (flap) edges of the wings. Long flexible shafts that extend out from the fuselage drive these actuators. To increase fuel efficiency on long-range aircraft, variable-area fan nozzles are driven by flexible shafts to increase or reduce the engine exhaust area.
In medical applications, orthopedic bone drills often operate in hard to reach locations. Flexible-shaft drill-bit assemblies let surgeons access these spots, saving time and permitting smaller incisions. Likewise, flexible shafts are useful in endoscopic instruments and surgical staplers.

Design guidelines
Regardless of the application, the most important variables to consider when choosing or designing a flexible shaft are the torque, directional operation, minimum bend radius, deflection, and speed. In some applications it is useful to additionally determine the point of helix and axial stretch. Keep in mind for any application the operating environment could change the type of material chosen as well as other design elements.
Torque will determine the shaft diameter and its construction. A larger diameter typically equates to higher torque capacity. A flexible shaft is made of layers of wires. The number of layers, the number of wires per layer, and the size of the wires within each layer are all variables in flexible-shaft construction. For a given diameter, this construction can be varied to achieve different performance characteristics, including torque, bending flexibility, torsional deflection, axial stretch, bidirectional capability, and other parameters.
Directional operation is whether the shaft will be transmitting torque in both directions (bidirectional) or only in one direction (unidirectional). A bidirectional shaft will typically have a construction consisting of many layers of smaller wires. This lets a shaft behave similarly in both directions — though it will always be a little stronger in one direction than another. If the shaft is required to transmit torque in only one direction, then it will have fewer layers of larger wires, which will make it very strong for the direction of operation and much weaker in the other direction.
A flexible shaft can run almost indefinitely in a straight configuration. When the shaft is bent, wires within the layers exert forces on each other causing internal friction — part of the dynamic process of transmitting torque through a curve. As the bend radius gets smaller, internal friction increases. Designers are often interested in the amount of internal friction, and free-running torque, to determine a minimum bend radius. Every flexible shaft has an associated minimum operating radius beyond which it will not function properly. If the bend radius is tight, a highly flexible construction can provide low internal friction in a small bend radius.
In some applications it is desirable to know how much twist or torsional deflection the flexible shaft will experience due to an applied torque. If the design requires the flexible shaft to synchronize movement between two ball screws, for example, then the torsional deflection becomes important so the system does not rack. The flexible shaft construction can be modified to reduce or increase torsional deflection.
Rotational speed of the shaft is another design parameter. Some systems are turned by hand, others operate at 12,000 rpm or more. Friction within the shaft will be very different at these extremes. In most applications, speeds below 3,000 rpm do not require any special considerations. Above this level, the system may require a custom shaft design and casing. At high speeds, lubrication becomes a consideration as well.
In any application, the designer also needs to consider whether the flexible shaft will be using a casing — the protective sleeve around the shaft. This casing helps prevent damage, keeps out dirt and dust, contains lubricant, and protects users from the rotating shaft core.
The point of helix is the torque load at which the flexible shaft begins to take the shape of a corkscrew or helix. It’s always important to operate below this torque level, otherwise, stresses within the wires increase and radial forces press the shaft outward against the casing, accelerating friction and wear.
All flexible shafts either get longer or shorter when a torque is applied. The degree of change is typically small, but over long shaft lengths, it can become important to account for the axial stretch. Axial stretch is the length change, which is important to determine so end fittings do not pull out from mating components.
Recent advances
Flexible shafts have been around for years, but some recent advances are leading to better designs and performance. For instance, one of the long-standing engineering hurdles has been creating accurate mathematical models of the construction and behavior of flexible shafts.
Flexible shafts are surprisingly complex products whose behavior is not easily predicted by simple calculations. Recently, Dr. Adam Black, an expert on flexible-shaft design, developed mathematical models that help solve this design challenge. They are used as the foundation of engineering software called Perflexion, which models the behavior of all the wires within the shaft.
For example, one of the most-challenging aspects of designing a flexible shaft is balancing the opposing properties of bending flexibility and torsional deflection. Prior to Perflexion, it was nearly impossible to optimize one of these characteristics without compromising the other. Now, engineers can reportedly model the behavior of all the wires within the shaft and arrive at a design that provides maximum bending flexibility while minimizing torsional deflection. In some cases, the deflection can be improved by 20 to 30% above accepted industry standards.
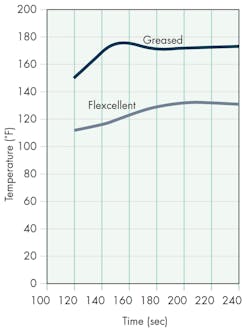
On the performance side, S.âS. White Technologies, Piscataway, N.â J., has developed a permanent lubrication system called Flexcellent that extends the endurance life of flexible rotary shafts. It combines a dry-film lubricant and aerospace-grade grease. The combination extends endurance life by slowing temperature rise. In aerospace applications, results show it significantly reduces downtime and repair and maintenance costs.
Edited by Lindsey Frick • Resources: S.âS. White Technologies
This file type includes high resolution graphics and schematics.
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: