
Motors that run typical industrial applications employing conveyors, pumps, blowers, and compressors all have one common quality: They draw a large amount of current when they start up, perhaps six times what they draw during normal operation. This level of current can stress motor components and cause power quality issues on plant electrical systems, particularly for larger motors of 1 hp or more. That is why motors of this size frequently employ soft starting.
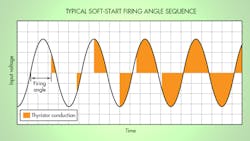
The idea behind a soft start is to gradually allow the motor current to rise until the motor reaches its steady state. This reduces start-up current but also reduces start-up motor torque. Soft starters adjust motor voltage through use of back-to-back thyristors or triacs in each ac supply line to the motor. The thyristors are actuated during the start-up phase such that their turn-on is successively delayed less for each ac half cycle. The delayed switching effectively ramps up the average ac voltage to the motor until the motor sees full line voltage. Once the motor hits its rated speed, the thyristor switching circuit may be bypassed. Larger motors employ either soft starters or they are controlled by variable-frequency drives that incorporate a soft-start function.
This file type includes high resolution graphics and schematics when applicable.
A soft starter can be contrasted with a full-voltage starter (manual and magnetic), which applies full voltage directly to motor terminals on start up. Full-voltage starters today generally are confined to smaller motors where start-up current isn’t an issue.
Some soft starters can also provide a soft-stop function in applications where an abrupt stop can cause problems. Examples include pumps where a quick stop can bring on water hammering and conveyor belts where material can get damaged if belts stop too quickly. The soft-stop sequence uses the same power semiconductors employed for soft starting.

A special kind of soft-start function called star-delta start is sometimes used on three-phase motors. Basically it starts the motor with stator windings connected in a wye configuration and switches them to a delta configuration when the motor hits its normal operating speed. Here, the starter normally consists of a contactor for each of the three phases, an overload relay and a timer that sets the duration of time in the star-position. The starting current is about 30% of that seen during direct on-line start and the starting torque is about 25% of what would be available at a direct on-line start. This starting method only works when there is a light motor load during the start. Motors that are too heavily loaded won’t have enough torque to accelerate up to speed before being switched over to the delta position.
Soft starters are generally used with induction (asynchronous) motors. But they also may provide benefits powering synchronous motors. The reason is that many synchronous motors behave like induction motors initially when they start up. That is, there is a lag between the rotating electric field and the rotor position. There is a delay before the motor comes into a synchronous condition. As in the case of induction motors, synchronous motors can also draw large stator currents during start-up of perhaps five to eight times the full load current in the absence of soft starting.
In both induction and synchronous motors, high stator and rotor current at start-up leads to a low power factor, typically about 0.2 lagging. Power factor and, thus, energy efficiency, rises as the motor accelerates up to its running speed. In this regard, it should also be noted that some soft starters could serve as voltage controllers or voltage regulators for the motor. Their back-to-back thyristors or triacs make this possible because they can adjust motor voltage depending on the load the motor sees, when paired with an appropriate controller. Thus, functioning this way, a soft starter can double as an energy manager: A controller monitors the motor power factor, which is a function of motor loading. On light loads, the power factor is low enough that the controller reduces the motor voltage and, thus, the motor current.
Soft starter selection
Many of the applications to which soft starters are applied fall into general categories of pumps, compressors, and conveyors. There are a few rules of thumb for each of these uses.
The start-up time for soft starters is user settable. The typical start-up time for most applications ranges from 5 to 10 sec. The longer time periods tend to be found in pumping and compressor applications where there is a high possibility of pressure waves building up in piping systems.

The initial start voltage is settable as well, but most applications use a start level that is 30% of the line level. Screw compressors and conveyors sometimes start at higher levels (perhaps 40%) depending on the load — conveyors sometimes have material on them when they start up so they may need a higher starting torque, and screw compressors have don’t develop much pressure at low speeds.
Soft starters typically have the same rating as the motors they power. The situation may be different for start-up ramp times and initial voltage levels that are outside the norm. For heavy-duty uses, a common practice is to use a soft starter having a power rating one size bigger than the motor and to use an overload relay when ramp times grow long; ditto for applications with frequent starts.
About the Author
Leland Teschler
Lee Teschler served as Editor-in-Chief of Machine Design until 2014. He holds a B.S. Engineering from the University of Michigan; a B.S. Electrical Engineering from the University of Michigan; and an MBA from Cleveland State University. Prior to joining Penton, Lee worked as a Communications design engineer for the U.S. Government.
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: