Humanoid Robot Handles Delicate, Difficult Deep-Sea Missions

To test the capabilities of underwater humanoid robots in delicate underwater tasks, Stanford scientists sent a prototype robot diver, OceanOne, to retrieve an artifact from La Lune, the flagship of King Louis XIV. Capsized in 1664, the ship lies 100 meters below the Mediterranean Sea, 20 miles off the southern coast of France.
During its mission, OceanOne sent real-time video footage to researcher Oussama Khatib, who used a joystick to control it from a boat. While handling the artifact, Khatib received haptic feedback from force sensors on Ocean One’s wrists so that he could gauge the strength of the grip without breaking the object.
OceanOne’s sleek humanoid design makes it more dexterous than most current underwater remote-operated vehicles (ROVs), which tend to have a boxy design equipped with job-specific end pieces and appendages. In the future, the humanoid design may also enable controllers to communicate with other divers and camera-equipped ROVs via hand gestures.
Other Cutting-Edge Features
â
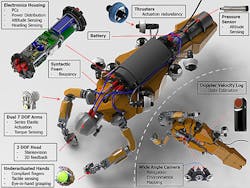
OceanOne propels itself through the water using eight tiny multidirectional thrusters. It leverages calibration hardware to adjust to turbulence for seamless travel to its destination. OceanOne is immersed in oil, thus making it waterproof up to 2000 meters. It has series elastic arms with 7 degrees of freedom and wrists with force sensors. Future prototypes are expected to include haptic sensors on each finger.
The head houses a majority of the electronics and balance sensors, in addition to a vault on the back. It also contains a stereovision camera, while the underside has a wide-angle camera for navigating and environmental mapping.
OceanOne’s success in handling a delicate artifact marks its potential for other sensitive missions that are too dangerous for human divers. Soon, robots like these will be used to explore the Red Sea in depth. Future mission plans include exploration of delicate mesophotic coral reefs, which are too deep to be reached by scuba divers, but tend to be shallow enough to qualify for deep-sea programs. The robot may also be used to neutralize underwater disaster zones.
About the Author
Leah Scully
Associate Content Producer
Leah Scully is a graduate of The College of New Jersey. She has a BS degree in Biomedical Engineering with a mechanical specialization. Leah is responsible for Machine Design’s news items that cover industry trends, research, and applied science and engineering, along with product galleries. Visit her on Facebook, or view her profile on LinkedIn.
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: