The last few years have shown progress in finite-element analysis intended for use by design engineers. Many programs that work with CAD provide several different types of analysis, and the range of capabilities keeps growing. The new tools encourage design engineers to move past ubiquitous static analysis and into the realm of analyses that more accurately model product behavior. Vibration analysis, often called dynamic analysis, is one area where FEA technology is on the move.
Authored by: Edited by Leslie Gordon Resources: Key points: |
Vibration-analysis studies pertain to elastic or deformable bodies vibrating about the position of equilibrium. Different modules of FEA programs each handle different kinds of vibration problems. However, a vibration analysis in FEA almost always starts with a modal analysis. Modal analysis provides important results on its own that can also be used as inputs for other types of vibration analysis such as analyzing random vibration.
Modal analysis
Also called frequency analysis, modal analysis finds the natural or resonant frequencies of a structure and the shape of the structure at each frequency (also called the “mode of vibration” or the eigenvector.) Modal analysis assumes the structure vibrates in the absence of any excitation and damping. Vibration textbooks call this state free undamped vibration.
Although a real-life structure has an infinite number of resonant frequencies, it still has discrete modes of vibration. Each mode corresponds to the situation where elastic forces cancel with inertial forces. Therefore, the mode of vibration may be seen as the shape of the structure that leads to the cancellation between inertial and stiffness forces for a given frequency of vibration. The resultant stiffness of the structure vibrating in resonance is zero. In reality, damping controls the stiffness of a structure vibrating in resonance, but damping is not modeled in modal analysis.
Because excitation and damping aren’t considered in a modal analysis, the calculated displacements of a particular component are meaningless. For example if a straight cylindrical bar undergoes a modal analysis and it is found that one end of the part displaces up to 10 cm, and the other end of the part displaces up to 5 cm, the actual displacement values mean nothing. That’s because some FEA software normalizes the result — that is, takes the largest value of displacement and divides every displacement by that value. In the example, this means that one end of the part displaces “1,” or has the largest displacement, and the other end of the part displaces “0.5”, or half of the largest displacement. The information is valid in the sense that it tells how much some areas will move relative to other areas on the same part. However, the information does not reveal the actual displacement values.
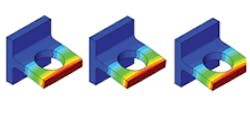
Although stress results from modal analysis are meaningless in terms of reported quantities, the distribution of stresses does provide valuable insight into structural properties. The FEA software highlights areas in the first few modes (the first mode represents the lowest number of cycles/sec) as being predisposed to structural failure because it is these modes where the structure tends to maximize the kinetic energy. The structure therefore vibrates by “hinging” about stiff locations, leading to high local deformations and, consequently, inherent structural weaknesses.
Rigid-body modes
Modal analysis can also be executed on models with rigid-body vibration modes (RBM). A RBM is one that does not induce any elastic deformation. The maximum number of RBMs in an unsupported model is six — three translations and three rotations. The FEA program assigns the zero frequency (or close to zero due to numerical error) to RBM natural frequencies. An unsupported 3D model will therefore show six rigid body modes with zero frequencies. An analysis of a partially supported model will return as many zero frequency modes as there are RBMs present in the model. In the case of an analysis with no restraints, the first elastic mode is mode number 7, the second elastic mode is mode number 8, and so on. This is the nomenclature — modes 1 through 6 are rigid-body modes; elastic modes are number 7 and up.
The use of modal analysis to detect RBMs is helpful for troubleshooting restraint problems found, for example, in a static analysis. When a static analysis fails with an “insufficient restraints” error message, you can run a modal analysis on the same model and identify the direction(s) of movement corresponding to 0-Hz mode(s). The direction of a displacement reveals the missing restraint.
Natural frequencies
The natural frequencies strongly depend on the applied restraints. Most often, the natural frequency rises when adding restraint because this makes the structure stiffer. However, adding restraints can have the opposite effect — the natural frequency might decrease. For example, consider a model without supports. It has six RBMs and vibrates about its center of mass. In contrast, a model supported by spherical bearings on both ends allows for rotation but not translation. This model has one RBM — rotation about its axis. The frequency of the partially supported shaft is lower than the frequency of the unsupported shaft because more mass participates in vibrations.
Natural frequencies can also significantly depend on the applied load. When this is the case, modal analysis must account for prestress. A predominance of tensile stresses raises natural frequencies, so it is typically necessary to consider the effects of prestress in rotating machinery, for instance. On the other hand, a predominance of compressive stresses shifts natural frequencies down. Analysis of natural frequencies in a compressed column shows that the first natural frequency shifts down with higher load. The magnitude of compressive force bringing the first natural frequency to zero corresponds to the buckling load.
Common errors in modal analysis
Generally, modal analysis requires a less-refined mesh than stress analysis of the same model. It’s permissible to remove small details from the model as long the analysis objective is limited to finding the modes of vibration and the modal frequencies. However, if modal analysis is providing data for a subsequent vibration analysis with the objective to calculate stresses, then the model must include the details. Also, note that an overly coarse mesh overestimates model stiffness and calculated frequencies are artificially high.
The most common and severe error in modal analysis is to interpret the displacements and stress results as real ones. These results can only be used in the comparative sense and only for comparisons within the same mode.
Another common error, which actually happens often in all kinds of FEA, is that of overrestraining the model. In modal analysis, this results in incorrect modal shapes and artificially high modal frequencies.
Finally, the material definition must include mass density defined in a unit derived from the unit of length and the unit of mass used in the analysis. It is not unusual to see errors of 12 orders of magnitude in the material density definition if the numerical value of the mass density based on meters is used in a model where length is measured in millimeters.
Vibration analysis
Almost every textbook on mechanical vibration features a single-degree-of-freedom (SDOF) oscillator. This discrete system separates mass and stiffness: The mass generates inertial effects, and the spring, elastic (stiffness) effects. The SDOF can be easily simulated with FEA to calculate its single natural frequency while the spring is deforming and the mass is moving as a rigid body.
Pictorial representations of SDOF and 2DOF systems are idealized objects: Any real part or assembly has an infinite number of natural frequencies and associated modes of vibration. In practical vibration problems, only a few lowest modes are important in finding the vibration response to excitation. The “modal-superposition method” lets you find this by analyzing a system with just a few DOF as follows:
1. Decide how many modes should be considered to model a vibration response. Because each mode is characterized by its mass participation, a frequently followed rule is to consider enough modes to reach at least 80% of the total mass participation.
2. Run a modal analysis to find the modes. A structure vibrating in each mode can be considered as a SDOF characterized by a percentage of the total mass participating in vibration, the natural frequency, and the direction of vibration.
3. Find the response of each SDOF to the excitation.
4. Represent the vibration response of a model as a superposition of responses of the SDOF systems. Note that for this method to be valid, the system must be linear.
With the results of the modal analysis for the natural frequencies and the associated modes of vibration in hand, next comes performing a vibration analysis to calculate displacements and stresses. The common types of vibration analysis based on results of the modal-superposition method are time response and frequency response.
A vibration problem can be presented by the following equation:
Md+Cd+Kd=F(t) where M = mass matrix, C = damping matrix, K = stiffness matrix, F = vector of nodal loads (loads on points in the FE model), d = unknown vector of nodal displacements, and t = time
The vector of nodal loads is a function of time. All matrices are square and their size is equal to the number of DOF in the system. This, in turn, corresponds to the number of modes considered by the modal-superposition method. The FEA application solves the equations for displacements and calculates the stresses from the displacement results.
Lingo to know A mechanism is not firmly supported and can move without having to deform; a mechanism’s components can move as rigid bodies. On the contrary, any motion of a structure must involve deformation because a structure is, by definition, firmly supported. This motion may take the form of a one-time deformation when a static load is applied, or the structure may be oscillating ab out the position of equilibrium when a time-varying load is present. In short, any motion of a structure must be accompanied by deformation. Otherwise, it is not a structure. If an object moves without deforming, it is classified as a rigid body. A frying pan in a free fall can be considered as a rigid body. However, the same frying pan subjected to a load experiences deformation and must be modeled as a deformable (elastic) body. |
The software assumes a certain time step so numerical efforts depend on the duration of the modeled event. For practical consideration, this approach is suitable for modeling events of short durations such as an impact load or pyrotechnic shock. Given a sufficient duration, a time-response analysis captures both the transient and the steady-state response of the analyzed structure.
On the other hand, in a frequency response analysis (the terminology used in your FEA program may be different), excitation is an explicit function of frequency.
So, a vibration problem can also be presented as:
Md+Cd+Kd=F sin (ωt) where the vector of nodal loads Fsin(ωt) is a function of the excitation frequency rather than time. All other components are identical to the previous equation.
Frequency-response analysis is for events of longer durations, where sufficient time has passed to reach the steady state. A typical example would be the simulation of a structure’s response to a shaker excitation where the excitation frequency is slowly changed within the range of interest.
In this example, the software calculates the steady-state response such as the maximum displacement amplitude and maximum stress amplitudes. The numerical effort required to complete the analysis depends on the number of considered modes and on the range of analyzed frequencies. The frequency-response analysis captures only the maximum response in the steady-state vibration.
Common problems
A structure’s vibration response in these examples is a superposition of responses of all modes calculated in the modal analysis. Thus, when an important mode is missing, vibration analysis results are incorrect. Another problem: It might be tempting to run a frequency-response analysis because it is much faster than a time-response analysis. However, this ignores transient response, which may have an important contribution to vibration response.
Last, damping is an ambiguous parameter. Unless the structure has explicit damping provided by a device such as a shock absorber, damping must be estimated. It is most often defined as a modal damping, which is a percentage of critical damping in a given mode.
About the Author
Leslie Gordon
Leslie serves as Senior Editor - 5 years of service. M.S. Information Architecture and Knowledge Management, Kent State University. BA English, Cleveland State University.
Work Experience: Automation Operator, TRW Inc.; Associate Editor, American Machinist. Primary editor for CAD/CAM technology.
Voice Your Opinion!
To join the conversation, and become an exclusive member of Machine Design, create an account today!

Leaders relevant to this article: